

Deslocamento de Alto Faltantes
- Mikael Oliveira

- 24 de out. de 2025
- 10 min de leitura
Atualizado: 25 de out. de 2025
Já consideramos o parâmetros básico de nossos alto-falantes no post http://wix.to/DGEg3GE?ref=2_so , agora abordaremos mais um tópico muito simples e não menos importante e algunas informações complementares ,
Creio que com alguns tópicos na sequência e um pouco de experiência selecionaremos o melhor "falante" para um determinado projeto ou aplicação .
Para acompanhar esse post você sò precisa de uma calculadora e um bloco de anotações com um lápis ( esse conjunto de ferramentasme faz lembrar minha época de estudos no ensino médio ) vamos lá .
Apenas uma olhada nas especificações é possivelmente uma das decisões menos audíveis que tomaremos no estágio de designer de caixa.

Além disso ,a "tediosa" atividade detalhada de "desenhar" estratégias e escolha de componentes com todas informações técnicas embadadobna aplicação é mais informativa, pois nos faz parar e pensar:
Vou ter o máximo de aproveitamento do sistema ? A resposta final agrada meus ouvidos ou dos ouvintes ? Vou ter uma durabilidade do sistema ? Os componentes do sistemas está bem dimensionado (sobre-dimencionado ou com folgas,projeto ficou mais caro , sub-dimensionado afetará a durabilidade , porém pode haver decisões que requerem essas decisões para que atinja o resultado alvo ) e o mais importante que devemos estar constantemente questionando durante o projeto,o resultado alvo fou alcançado ?, o "custo" valerá o resultado e qual tempo para finalização ?
Sobre esses questionamentos temos uma matéria que na engenharia me envolve com setor comercial querendo ou não sempre será necessário caso queiram que esse estudo "vire" um produto ou quando envolvemos benefíciar pessoas com nosso projeto . "Processo de desenvolvimento de produto" vamos abordar isso no futuro com ênfase na área de áudio. Isso não se encontra por aí rsrs , então aguardem ...
Vamos lá !
Todos nos lembramos da escola que F = m.a , não é mesmo ?
Em um alto-falante o F (força) é um produto da força do ímã e da bobina de no gap do ímã.
Sem surpresa, isso geralmente é mostrado nos parâmetros da unidade de acionamento Thiele Small como produto BL .
Então, substituindo isso em nossa conhecida equação, obtemos BL=ma .
Assim, reorganizando, agora sabemos que podemos calcular a aceleração do motor a partir de a=BL/m , ou melhor, Γ=BL/m .
Aceleração do cone Γ é:
Produto da força de um do motor dividido pela massa em movimento
Densidade de fluxo B multiplicada pelo comprimento da bobina no intervalo L dividido por (cone+bobina de voz + suspensão básicamente ) MMS.
Expressa em metros por segundo por segundo por ampère (unidade de corrente aplicada)
ms^-2.A^-1
Expressa o poder de resolução do sistema do motor da unidade de acionamento enquanto o movimento do cone permanece pistônico.
Isso não foi difícil, foi?
a (aceleração) , expressa como Γ (gama maiúsculo), obviamente será medida em metros por segundo ou velocidade por segundo (taxa de mudança de velocidade, também conhecida como aceleração), comumente escrita como ms^2 (metros por segundo ao quadrado) .
No entanto, este é o fator de aceleração , (sendo expresso como 'Γ' em vez de 'a'), como qualquer outro fator em física ou engenharia, é específico , ou seja, dependente do contexto.
Portanto, é necessário incluir a unidade de seu contexto, que é a corrente de 1A aplicada para gerar cada unidade de aceleração.
O m (massa) em questão é a massa das partes móveis do alto-falante.
Sabemos que estamos falando de alto-falantes de "bobina móvel", então obviamente a bobina é uma parte móvel.
A próxima parte móvel é o cone que é colado na borda e na bobina o protetor de pò ,adesivos de colagem dessas partes.
Um pequeno pedaço de cordoalha,estanho usado para soldagem e um adesivo para fixar a soldagem também deve ser considerado parte móvel.
Uma parte da suspensão da aranha que se move (a suspensão que centraliza a bobina de voz na abertura da peça polar) e uma parte da borda frontal do cone que se move compõe massa móvel total.
Esta detalhada em setores essas descrição pois vamos abordar essas partes de forma distintas posteriormente.
Infelizmente, isso pode não ser linear..., pois a quantidade de suspensão corrugada que se move com o cone durante uma excursão muito pequena , não é a mesma durante uma excursão grande e outros fatotes de construção da própria centragem que veremos mais á frente.
No entanto, para fins de medição de parâmetros , é comum assumir uma situação de pequena excursão nas declarações nos manuais dos fabricantes .
Felizmente, nós, construtores ou designer de gabinetes não precisamos preocupar nossas lindas "cabecinhas" com essas medidas , pois os fabricantes fizeram tudo isso por nós quando prepararam a tabela de Parâmetros T/S (mas em caso de desconfiança de alteração por motivo comercial ou outro sempre é bom ter um bom medidor de parâmetros em mãos ou métodos para chegarmos em uma consenso confiável).
Os fabricantes expressam a massa móvel total em gramas e, a menos que o Sistema International tenha alterado as definições aceitas, a massa deve sempre ser expressa em kg, lembre-se de verificar e, se necessário, converter por exp-3.
Então só temos isso a fazer :
Veja a folha de dados e digite o valor do produto BL em sua calculadora.
Agora digite o sinal de divisão .
Agora digite a massa em kg.
Agora pressione o botão igual .


O valor que você tem agora, geralmente entre 100 e 1000 ,lms^-2.A^-1 que define teoricamente a aceleração máxima da bobina e do cone na unidade de acionamento em questão.
Como isso nos ajuda, o designer/construtor de caixas na definição e escolha do "Alto falante" no projeto ?
Superficialmente, isso deve definir o limite superior de largura de banda da unidade de acionamento, e por vários motivos pode ser que não...
Haverá contra-argumentadores que diram esse cálculo apenas descreve o limite teórico de largura de banda .
De fato, este seria , caso de alguns Alto falantes de cone rígido projetados para funcionar abaixo de sua primeira frequência de ruptura , como cones de alumínio anodizado etc..
No passado, anéis anulares flexíveis eram comumente usados em "cones de papel " ( famoso protetor com aba)
e ainda são usados em alto-falantes atuais ) para introduzir quebra de cone controlado para estender a largura de banda.
Hoje em dia muitos cones contam com quebra de cone cuidadosamente controlada para estender a parte superior largura de banda por perfis exponenciais de plásticos modernos e compositos, reduzindo assim também a massa em movimento com frequência crescente.
Temos também Alto falantes que desenvovemos um perfil de cone específicos com a combinação de materiais (basicamente equilibrando massa e flexibilidade ) que permite que o cone se flexione proporcionalmente à frequência, o range de frequência ficaria mais alta que o caso de um cone rígido. (Isso é assunto para um novo tópico e muita informações e simulação em detalhes a nos próximos capítulos, mas brevemente uma pincelada abaixo.
"Nós não conseguimos algo de graça com muita frequência em áudio, isso parece bom demais para ser verdade!"
Vamos trocar os cones com matériais extremamente rigidos , deveria ter nenor ruptura de cone .
Seria muito bom se fosse verdade mas certamente por ser um som , não é 'verdadeiro' .
É inevitavelmente mais distorcido que o original.
E também quanto mais a flexão do cone for usada para estender a resposta acima da resolução do conjunto do motor, mais distorcida será a resposta em comparação com o sinal original nessas frequências.
A função da flexão do cone está por trás da assinatura sônica de diferentes materiais do cone (aos quais é adicionada a dinâmica da terminação do cone e adesivos).
A flexão cônica controlada é um dispositivo muito útil no projeto de um alto falante , permitindo que cubram banda passante muito maiores do que seriam possíveis de outra formas.
Isso significa menos vias por sistema,menos pontos de cruzamento,filtros mais simples, já conhecemos as desvantagens de filtros cruzados complicados.
Uma vantagem secundária é que a área reduzida do cone em frequências mais altas resultará em dispersão mais ampla (melhor resposta polar) do que no diâmetro total do cone se estiver se movendo como um pistão.
Nesses casos, a resolução de frequência definida deve ser maior no filtro passa-baixa no crossover.
Acabou os contra-argunentos agora ?, vamos voltar a contexto que está ficando interessante a partir de agora...
Como aplicar essa teoria ?
Para os construtores de DIY que projetam sistemas a partir do zero, vale a pena conhecer o poder de resposta teórica de um alto falante mesmo que ainda não dependeria necessariamente da distorção para obter uma oitava de brinde a mais.
Um expremplo :
Temos o tweeter, pois é um componente que estava guardado na gaveta por motivo que sempre ocorre, "vou comprar um dia vou usar ".
Digamos que a ressonância da suspensão do tweeter de Q=1 esteja logo acima de 1kHz.
Desejamos evitar aquele alto Q=1 (qualquer coisa acima de Q=0,7 é um inimigo no design de alto-falante de alta qualidade). [ Atenção ,é somente um exemplo e de uso próprio se vc achar diferente não tem problema algum, esse comentário não tem carater preconceituoso ideológica raça ou opção sexual, e sim de escolha própria por fatos provaveis mas não discutível . ]
Então preferimos alinhar o crossover de 3ª ordem (18dB por oitava) confortavelmente acima de 2kHz para evitar que o pico de ressonância interaja na resposta na região de banda passante uma oitava abaixo a 1kHz.
Se tivermos os dados T/S de três unidades de alto falantes por facilidade disponível , dos quais estamos tentando selecionar uma unidade de médios-graves para nosso próximo projeto, saber como seu potencial nessa banda intermediária crítica onde a expressão humana e instrumental é mais concentrada e onde nossa audição é, não por acaso, mais sensível.





Observamos os gráficos dos alto falantes disponível para ver qual deles permitirá que a seção passa-baixa alcance mais de 2kHz.
Todos os três parece que atingem 3kHz antes de cair , alguns mais "bicudos" do que outros.
Podemos supor que as respostas com aparência mais pontiaguda indicam que essas unidades estão distorcendo mais do que os gráficos com aparência mais suave,isso implica que as curvas mais ásperas indicam que os projetistas estão confiando mais em uma quebra de cone controlada do que nas de aparência suave ou que os de aparência suave disponibilizaram gráficos com resolução nenor , ou velocidade de sinal mais rápida, ou ambos.
As curvas não têm sentido em todos os aspectos, exceto nas tendências gerais (PERU) e comerciais como comparativos que vemos por ai principalmente feitas e talvez financiafas pelos próprios fabricantes.
Entretanto, a menos que sejam todos retirados de uma unidade de acionamento embutida em um defletor de dimensão padrão IEC, eles são inúteis para comparação de qualquer maneira.
Examinamos as curvas de nossos Três drivers com semelhantes acima de 200 Hz. Todos eles exibem a resposta de aumento suave gerada pela indutância da bobina de voz e conjuntos de ímãs de tamanho razoável. Nenhum tem falhas nas curvas de impedância sugerindo mudanças de fase repentinas e inesperadas (além da esperada no fs) causadas por ressonância.
Agora é hora de pegar as calculadoras Novamente.
-------------
Exemplos de acelerações do motorista:
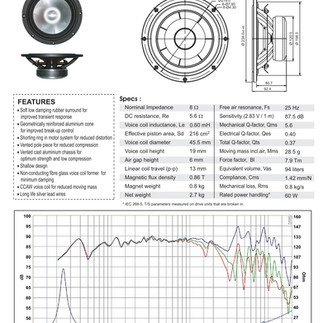
BL=12,64 m=0,0675kg Γ=187,2 ms^-2.A^-1
BL=6,4 m=0,0126kg Γ= 507 ms^-2.A^-1
BL=7,9. m=0,0285kg Γ=277,1 ms^-2.A^-1
todos retirados da gama de um fabricante
---------------
Veja como é claro a grande variação de valores de aceleração .
Esses drivers são todos projetados para atender a diferentes necessidades de OEM, em diferentes pontos de preço, com diferentes fs (ressonância de ar livre), diferentes materiais de cone, diferentes sensibilidades e com carga diferente.
Nenhum é melhor do que as outro.
Todos são específicos do uso, e o designer que avalia e decide melhor para seu uso.
O resultado da decisão de escolha entre os 3 modelos disponíveis , pode ser visto agora.
Quando as luzes ficam verdes , o modelo 2 acelera quase 3 vezes mais rápido que o motorista 1.
Se quisermos largura de banda não distorcida o modelo 2, pode ter uma vantagem imediata no lado comercial.
Uma olhada nos outros parâmetros T/S sugere que o driver 1 terá uma banda passante mais estreita , então podemos escolhê-lo para outro design com um ponto de cruzamento de passagem baixa abaixo de 2kHz, ele apenas luta até -6dB em 3kHz por meio de um pico maciço em 2,3 kHz.
A única maneira de reunir evidências para qualquer hipótese é testá-la.
Em 2008 tive a oportunidade de montar um teste tela primeira vez.l
Eu tinha dois pares de drivers de 200 mm do mesmo fabricante, usando as mesmas carcaça, mas ímãs e bobinas de voz diferentes.
Ambos foram destinados a unidades de médios e graves, O driver A ofereceu Γ=650ms^-2.A^-1 e o driver B oferecido Γ=390ms^-2.A^-1.
Para minimizar os efeitos de suas diferenças (dramáticas) de resposta de graves, usei um crossover ativo para limitar a largura de banda de 200Hz a 2kHz.
O ganho foi usado para equalizar a sensibilidade e a resposta de frequência foi próxima o suficiente entre os drivers para não exigir adaptação. Ambos os motoristas foram combinados com uma rede Zobel em seus terminais.
Os testes foram com um único alto-falante alimentado por vez com estéreo somado (muitas vezes mal denominado mono).
Com uma ampla variedade de material de programa, os resultados foram consistentes.
Driver A soou consistentemente mais detalhado e mais transparente.
O driver A também parecia mais dinâmico, mas isso será assunto de um artigo posterior.
Era como se o driver B estivesse sujeito a alguma compressão.
O driver B tem um produto BL mais baixo como resultado de uma bobina de voz mais longa para aplicações de gabinete selado e também um manuseio de energia muito maior devido a um diâmetro de bobina de voz maior de 40 mm.
Comprimento extra ou diâmetro extra reduzirá o produto BL com um determinado tamanho de ímã e o driver B obtém ambos.
Neste teste, o piloto A foi consistentemente julgado superior subjetivamente.
Porém , quando montado em suas aplicações projetadas, o driver B produziu graves mais profundos e melodiosos em sua caixa grande selada de alinhamento de Bessel (daí a 2ª ordem Q ~ 0,577) do que o driver A caixa dutada menor mais sensível, com bobina de voz curta de 25 mm precisava de um alinhamento QB3 para mantê-lo na lacuna.
Você não ganha algo por nada e esse fenômeno pode ter contribuído para a crescente popularidade do torres de chão de duas vias e meia nos últimos anos.
Conclusão
É possível prever mais do que o alinhamento dos graves a partir dos parâmetros Thiele Small.
É possível desenvolver hipóteses ( fazer suposições fundamentadas ) sobre o desempenho próximo ao topo da largura de banda da unidade de acionamento .
Essas suposições são baseadas nas capacidades do sistema do motor para responder ao sinal, em vez de engenharia inteligente de flexão do cone para estender a resposta aparente.
Para construtores DIY , raramente terá oportunidade de ter amostras antes da compra, quaisquer pré-julgamentos extras embasado são uma ajuda para fazer uma lista restrita .



Comentários